"AZ-EL ROTATOR"
3D printed AZ-EL rotator
The idea for this project started by pa3axa to make short range plane scatter qso’s on 24GHz.
The availability of wavelab 24GHz modules in combination with a light weight printed dish allows a light weight AZ-EL rotator for tracking the planes. Plane position is provided by receiving the adsb data from the planes in the surrounding area. The rotator will be mounted on a tripod and is also strong enough to hold a small combi yagi for satellite tracking.
First step is to design a small AZ-EL system fully 3D printed at small costs together with an control board with the possibility to interface to the adsb receiver or other pc software.
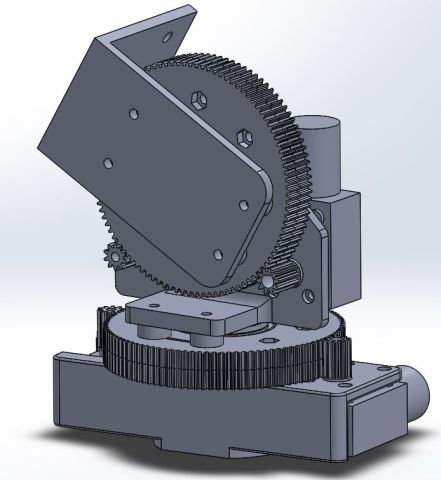
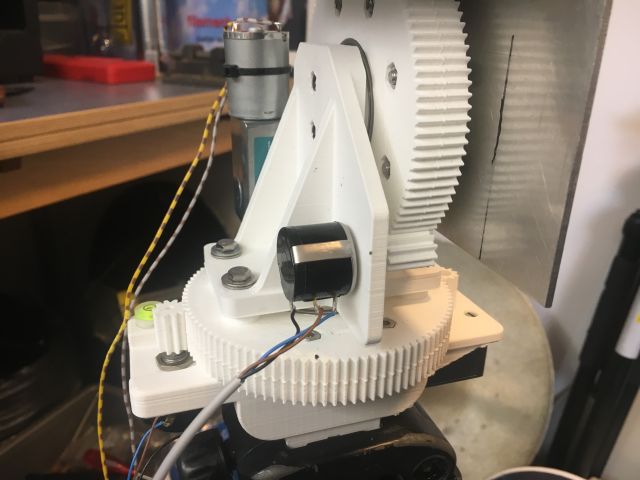
The rotator
The rotator is assembled from 7 different printed parts (some in greater quantities), 4 ball bearings, 2 geared 12V motors and 2 ten turn resistors for position reference. It is all screwed together with M4 screws and nuts.
The following printed parts should be made of PLA, wall thickness 1mm and infill 10%
Bottom baseplate (1pcs) baseplate_2.STL
Vertical base (1pcs) vertical base.STL
Big gear half (4pcs) tandwiel_groot.STL
Motor gear (2pcs) tandwiel_motor.STL tandwiel_motor.STL
Resistor gear (2pcs) tandwiel_potmeter.STL
Gear clamp (2pcs) lagerklem.STL
Standoff ring (8pcs) bus.STL
Other parts:
Ball bearing (4pcs) : 35x44x5mm 6707-2R Aliexpress
Motor (2pcs) : Bringsmart (2pcs) JGY-370 12V 10rpm Aliexpress
10 turn variable resistor Junkbox
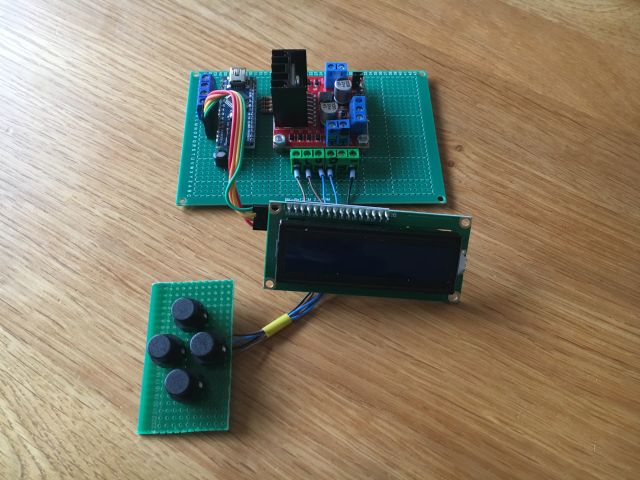
The control board
The rotor control contains an Arduino nano as its core, together with an L298N bridge motor controller and I2C 16x2 lcd display. Software is based on the Simplesat publication. The rotor controller listen to the Yeasu GS-232 commands generated by many different tracking software.
schematic diagram

Arduino sketch
AZ_EL_2 AZ_EL_2.zip